scvelo.tl.terminal_states
- scvelo.tl.terminal_states(data, vkey='velocity', modality='Ms', groupby=None, groups=None, self_transitions=False, eps=0.001, random_state=0, copy=False, **kwargs)
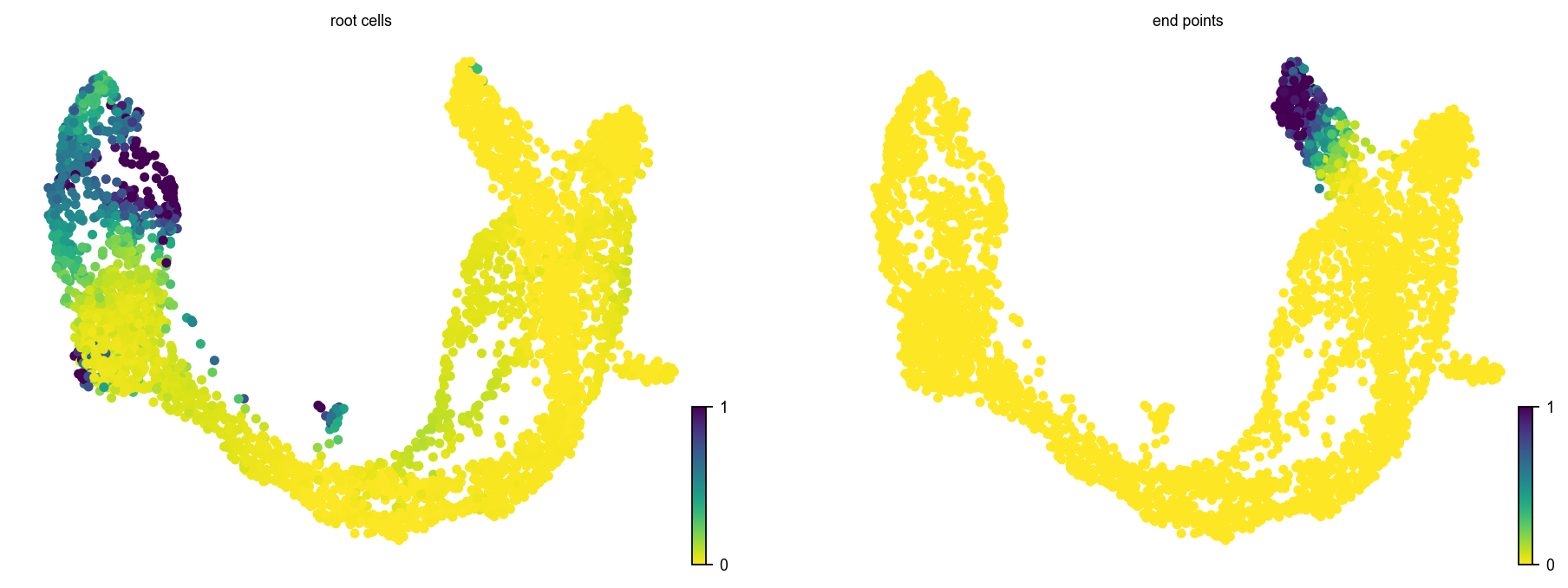
Computes terminal states (root and end points).
The end points and root cells are obtained as stationary states of the velocity-inferred transition matrix and its transposed, respectively, which is given by left eigenvectors corresponding to an eigenvalue of 1, i.e.
\[μ^{\textrm{end}}=μ^{\textrm{end}} \pi, \quad μ^{\textrm{root}}=μ^{\textrm{root}} \pi^{\small \textrm{T}}.\]scv.tl.terminal_states(adata) scv.pl.scatter(adata, color=["root_cells", "end_points"])
Alternatively, we recommend to use
cellrank.tl.terminal_states()providing an improved/generalized approach of identifying terminal states.- Parameters:
data (
AnnData) – Annotated data matrix.vkey (str (default: ‘velocity’)) – Name of velocity estimates to be used.
modality (str (default: ‘Ms’)) – Layer used to calculate terminal states.
groupby (str, list or np.ndarray (default: None)) – Key of observations grouping to consider. Only to be set, if each group is assumed to have a distinct lineage with an independent root and end point.
groups (str, list or np.ndarray (default: None)) – Groups selected to find terminal states on. Must be an element of .obs[groupby]. To be specified only for very distinct/disconnected clusters.
self_transitions (bool (default: False)) – Allow transitions from one node to itself.
eps (float (default: 1e-3)) – Tolerance for eigenvalue selection.
random_state (int or None (default: 0)) – Seed used by the random number generator. If None, use the RandomState instance by np.random.
copy (bool (default: False)) – Return a copy instead of writing to data.
**kwargs – Passed to scvelo.tl.transition_matrix(), e.g. basis, weight_diffusion.
- Returns:
root_cells (.obs) – sparse matrix with transition probabilities.
end_points (.obs) – sparse matrix with transition probabilities.